Master Thesis
|
Computer Vision based Aircraft parts inspection at Ecole des Mines Albi-Carmaux, in Albi, France
Abstract: Visual pre-flight walk-around inspection becomes an exhausting job for maintenance operators and co-pilots as the number of daily fight increases. This thesis focuses on developing autonomous exterior visual inspection of few aircraft parts to assist the grounds-men, by reducing their work-load. Priority is given to automatic inspection of aircraft landing tire, engine turbine blades, and detection of presence of wheel chock and pitot cover, using computer vision and image processing methods. Challenges are addressed to make the system robust to scale, illumination, surrounding environment, and inspection time constraints. Suitable cues are wisely used to define regions of interest, and further to detect anomalies. The utilized features are color, shape, ridges, geometrical primitives (lines, circles), and periodicity of intensity signals. Projection of simplified 3D model onto the image plane is used to approximate shapes to simplify the implementation which eventually reduces detection as well as inspection-time complexity. The developed system is integrated with a ground mobile robot which autonomously does walk-around and stops at predefined checkpoints. The robot uses a pan-tilt-zoom camera to capture images of check-items which the system later process for automatic inspection. The implementation results give promising accuracy and thus, demonstrate the usability of our system for automated airplane exterior inspection. Link to Project |
|
Bachelor Thesis
|
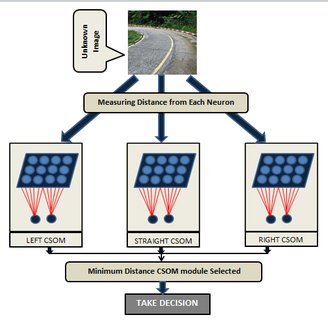
Intelligent Autonomous Vehicle Navigated by using Artificial Neural Network and DTMF Signaling over GSM Network
My thesis was to build an intelligent automated vehicle that would be able to navigate independently through commands from the computer. The commands were intellectually decided by using Artificial Neural Network. The mobile robot was also able to being navigated by a mobile phone simultaneously.
| ||
