Computer-Robot Interaction

|
Deep reinforcement learning to optimize interaction for a robotic tutor.
In this project, we developed an Artificially intelligent interaction management agent (a robot) which played the Enercities game with two other players using Deep Reinforcement Learning (DRL). The agent was provided with high-dimensional sensory raw data for both learning and selecting optimal action, such as the state of the game and conversation. The optimal actions that the agent chose were both the game moves and communicative actions. We modeled our Q-learning based DRL network using ConvNetJS library. |
|
|
| ||
Computer Vision
|
PASCAL project: recognition of objects from a number of visual object classes in realistic scenes.
We implemented a best suited strategy, from different combinations of descriptors and classifiers, to recognize objects from a number of realistic scene of visual object classes. We used SIFT library to automatically compute SIFT descriptors from an image, PRtools5 for Pattern Recognition, K-Nearest Neighbor, AdaBoost and SVC methods as classifier and ROC curve to compare the results.
|

| ||
|
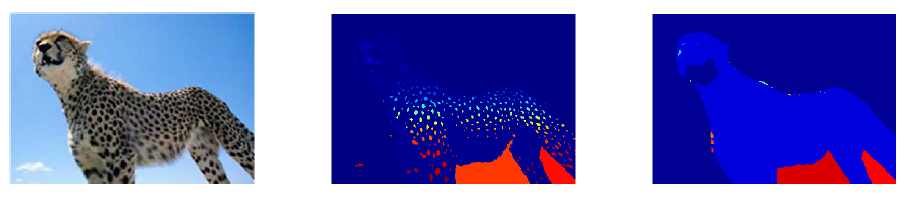
Image Characterization using Texture.
The main objective of this work was to enhance the performance of the region growing algorithm by computing textures of the images and generating output images to segment them. Co-occurrence matrices were generated and some statistics had been computed to apply at local level to produce descriptors for each pixel. These descriptors were the feature vectors for each pixel. Finally, the feature vectors were used to classify the data set textures in different classes. Thus the performance of the region growing segmentation algorithm's performance had been enhanced. | ||
|
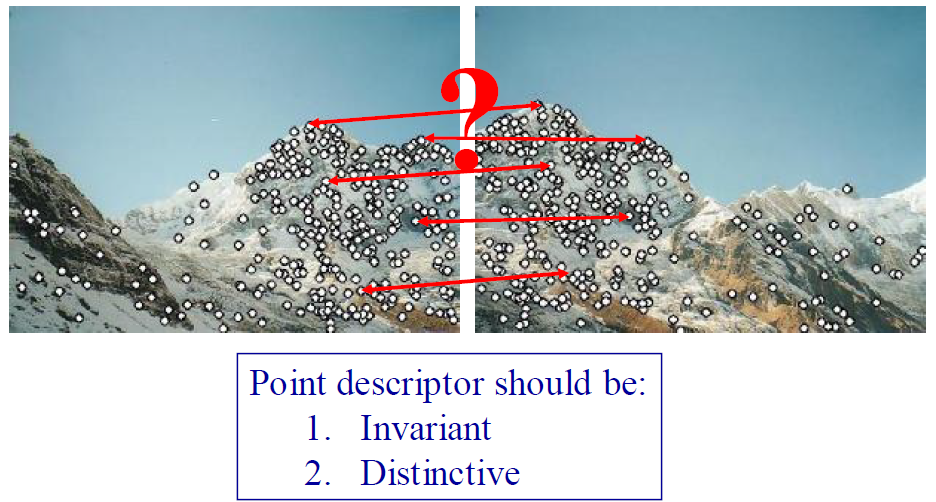
Problem based learning: Applications of Invariant features.
In this project work, we evaluated the performance of the SIFT descriptor for altering planar transformations (projection, rotation/orientation and scale) and the results were compared with the performance for SURF descriptor.
|
| ||
|
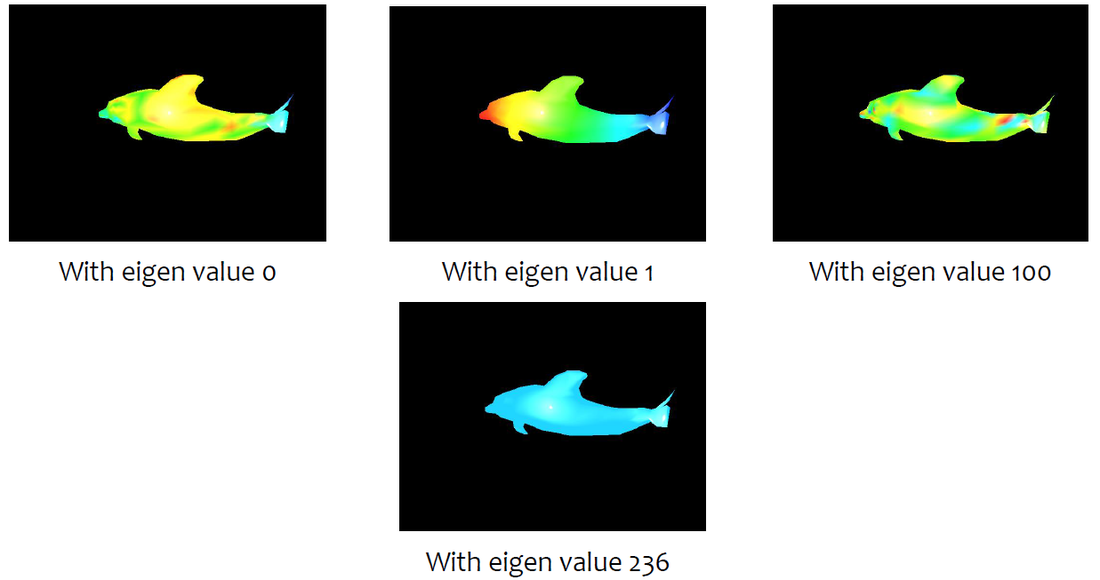
Spectral Mesh Analysis: Toward a simple implementation in C++.
Processing meshes on Cartesian coordinates stores only the absolute geometry information which makes it difficult in performing operations on the surface. Processing meshes on differential coordinate preserves the vertex information along with the relationship between the vertices. In this project, we implemented Laplacian framework to model meshes on differential coordinate. We designed our GUI using modern OpenGL shaders over mesh processing to make it easy-to-use. code
| ||
Medical Image Analysis
|
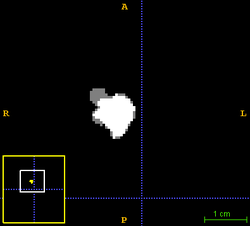
Medical Image Analysis: 3D Breast Ultrasound Image Segmentation.
This project work included segmenting 3D breast ultrasound images using several ITK segmentation algorithms. The segmented results were compared with provided ground truth to tune the algorithm and the parameters to obtain better segmented result. The results were evaluated using quantitative and qualitative methods. The modified algorithm was then used on the challenge day.
|
| ||
|
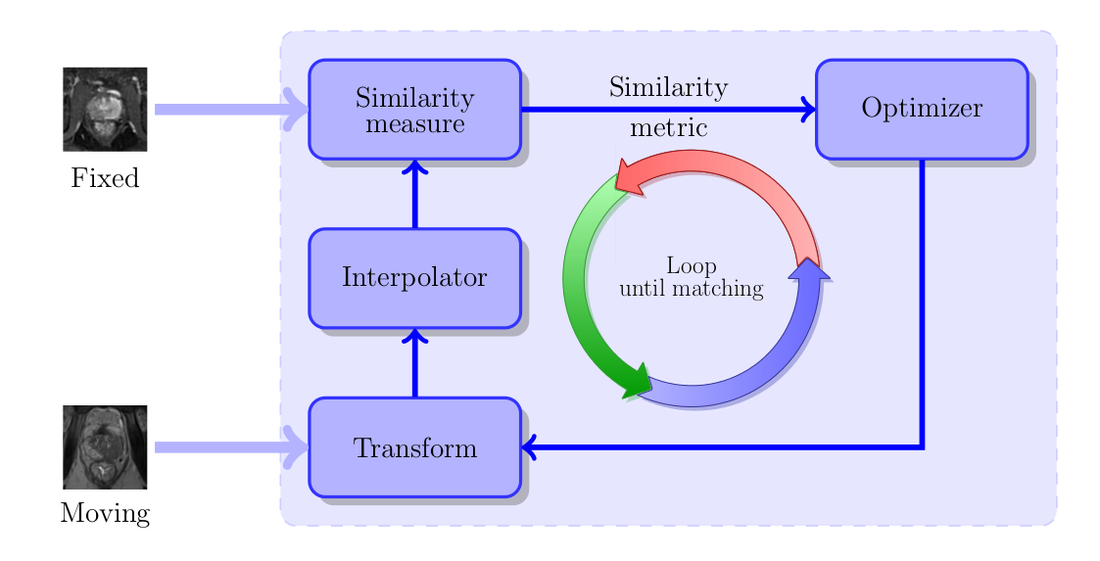
Medical Image Analysis: Image Registration.
The main objective of this work was to get introduced with different components of a typical image registration framework. A fully working registration framework has been provided with the lab document which implements a rigid registration algorithm which minimizes the sum of the squared distances (SSD). We had to modify the framework to incorporate mutual information metric as a new similarity metric. We also modified the framework to incorporate affine transformation. Eventually we modified the framework to incorporate multi-resolution framework.
| ||
Robotics
|
Particle Filter using ROS.
The main goal of this project work was to implement a Particle Filter or Montecarlo Localization (MCL) algorithm to localize a two dimensional robot (turtlebot) in a given map. Particle filter or Sequential Monte Carlo (MC) methods is a set of on-line posterior density estimation algorithms that estimate the posterior density of the state-space by directly implementing the Bayesian recursion equations. Markov localization is a probabilistic algorithm: Instead of maintaining a single hypothesis as to where in the world a robot might be, Markov localization maintains a probability distribution over the space of all such hypotheses.
|

| ||

|
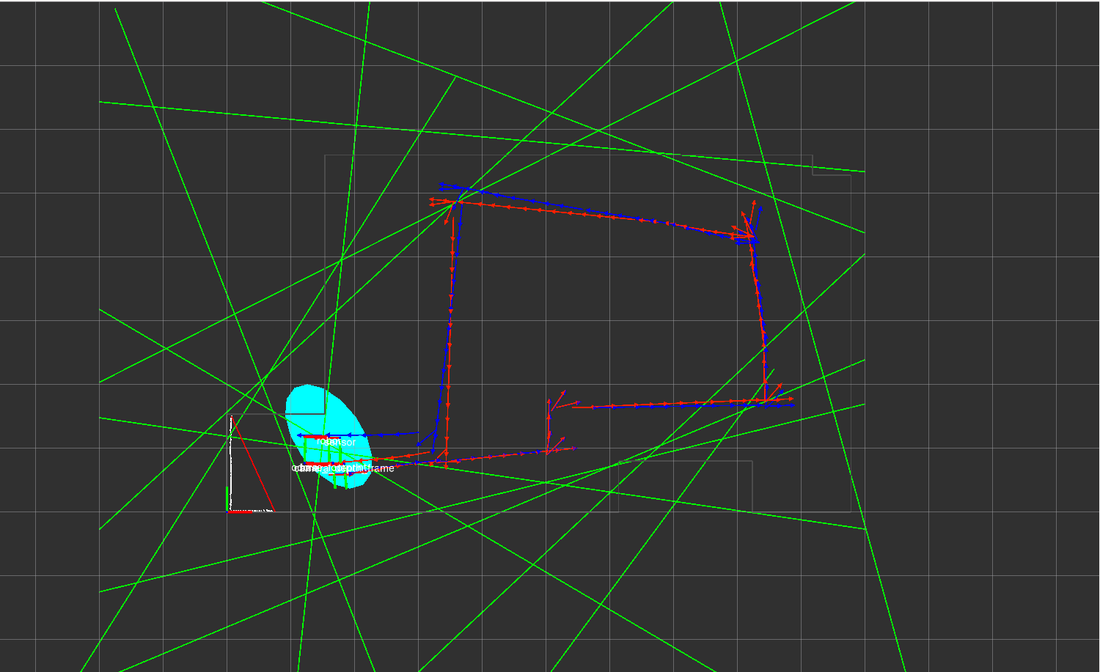
Extended Kalman Filter (EKF) map based localization using ROS.
The main objective of this project was to implement Extended Kalman Filter, map based localization algorithm to localize a Turtlebot using with odometry data from the robot. Map based localization means the localization of a robot using seen features of the map using moving. Implementation comprises Prediction, Data Association and Update steps where the Prediction step is based on the internal odometry measurement of the Turtlebot, Data Association step looks for closest correspondences between the provided measured lines and the map known a priori and the Update step updates the position of the robot according to the given current position.
| ||
|
Extended Klaman Filter (EKF) based Simultaneous Localization and Mapping (SLAM) using ROS.
In this project work we implemented Simultaneous Localization and Mapping (SLAM) using Extended Kalman Filter (EKF). Simultaneous Localization and Mapping (SLAM) is a technique used by robots and autonomous vehicles to build up a map within an unknown environment (without a priori knowledge), or to update a map within a known environment (with a priori knowledge from a given map), while at the same time keeping track of their current location
|
| ||

|
Tangent Bug algorithm implementation over real e-puck robot.
Tangent Bug path planning algorithm has been implemented over a real e-puck robot. We also implemented Tangent Bug algorithm over e-puck robot environment using V-REP simulator.
| ||
|
Robot Learning using Reinforcement Learning: Q-learning.
The objective of this project work was to implement a Reinforcement Learning algorithm, Q learning algorithm, to learn a policy that moves a robot to a goal position on a configuration space in Matlab. The configuration space or maps were represented by binary matrices where 0 represented free space and 1 represented obstacles.
|

| ||

|
Bug-2 algorithm with the e-puck mobile robot.
The objective of this project work was to implement the Bug 2 algorithm over a real e-puck to go to the goal without crashing with obstacles. The algorithm exhibits two behaviors: head toward goal behavior and obstacle following. In this project work, we combined both the obstacle following behavior of the robot with its head toward goal behavior
| ||
